
RASPBERRY PI w projektach
Podwozie 4WD
Tym razem podwozie na ramie plastikowej, ale również oparte na czterech silnikach DC.
Paczka wygląda tak...
 Po rozpakowaniu mamy takie elementy...
Po rozpakowaniu mamy takie elementy...
 W zestawie są:
- cztery koła,
- cztery silniki z przekładnią 1:48,
- rama plastikowa,
- koszyk na baterie,
- śrubki,
- narzędzia,
- instrukcja montażu.
Montaż rozpoczynamy od przełożenia przez płytę ramy, wsporników do których będą przykręcane silniki.
W zestawie są:
- cztery koła,
- cztery silniki z przekładnią 1:48,
- rama plastikowa,
- koszyk na baterie,
- śrubki,
- narzędzia,
- instrukcja montażu.
Montaż rozpoczynamy od przełożenia przez płytę ramy, wsporników do których będą przykręcane silniki.
 Następny krok to przykręcenie silników. I tu uwaga praktyczna - zanim przykręcicie silniki przylutujcie do nich kabelki. Lutowanie do silników przykręconych do ramy jest trudniejsze bo trudniejszy jest dostęp do wyjść silnika. Alternatywą jest zastosowanie wsuwek łączeniowych.
Ja wsuwek nie miałem, więc żeby przylutować kabelki, musiałem odkręcać silniki. :)
Następny krok to przykręcenie silników. I tu uwaga praktyczna - zanim przykręcicie silniki przylutujcie do nich kabelki. Lutowanie do silników przykręconych do ramy jest trudniejsze bo trudniejszy jest dostęp do wyjść silnika. Alternatywą jest zastosowanie wsuwek łączeniowych.
Ja wsuwek nie miałem, więc żeby przylutować kabelki, musiałem odkręcać silniki. :)
 Teraz zakładamy koła. Wielkiej filozofii tu nie ma, koła należy nałożyć na wał wystający z silników.
Teraz zakładamy koła. Wielkiej filozofii tu nie ma, koła należy nałożyć na wał wystający z silników.
 Gdy już mamy podwozie, czas zzmontować resztę ramy. Pierwszy krok - przykręcamy tuleje dystansujące.
Gdy już mamy podwozie, czas zzmontować resztę ramy. Pierwszy krok - przykręcamy tuleje dystansujące.
 Ostatni krok to przykręcenie płyty górnej.
Ostatni krok to przykręcenie płyty górnej.
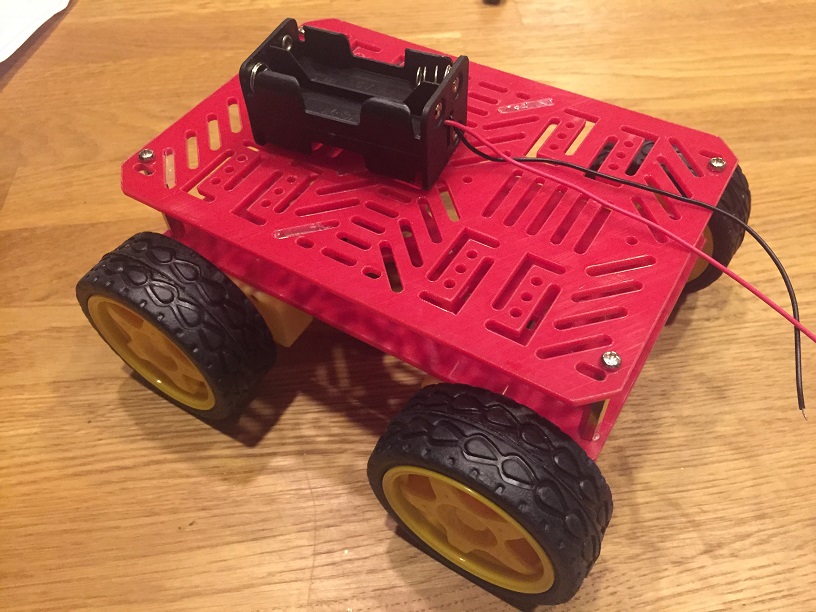 I w ten oto sposób mamy złożone podwozie jeżdżące dla naszego łazika. :)
Powyższe jest pierwszym etapem w skontruowaniu czegoś takiego.
I w ten oto sposób mamy złożone podwozie jeżdżące dla naszego łazika. :)
Powyższe jest pierwszym etapem w skontruowaniu czegoś takiego.
 Jest to autonomiczny łazik, za którego sterowanie odpowiada Raspberry Pi, za sterowanie silników sterownik DRV8835, a za zasilanie przetwornica step down S7V7F5. Do portów USB podłączona jest karta wifi, oraz mysz + klawiartura w wersji wireless.
Wszystko zasilane z akumulatora Li-Pol 7,4V.
Do tego kilka linijek kodu i łazik śmiga jak szalony.
Ale jak go zaprogramować napiszę już w kolejnych wpisach. :)
Efekt wyglądać będzie mniej więcej tak...
Jest to autonomiczny łazik, za którego sterowanie odpowiada Raspberry Pi, za sterowanie silników sterownik DRV8835, a za zasilanie przetwornica step down S7V7F5. Do portów USB podłączona jest karta wifi, oraz mysz + klawiartura w wersji wireless.
Wszystko zasilane z akumulatora Li-Pol 7,4V.
Do tego kilka linijek kodu i łazik śmiga jak szalony.
Ale jak go zaprogramować napiszę już w kolejnych wpisach. :)
Efekt wyglądać będzie mniej więcej tak...
:)