Regulator PID
Tym razem odpalamy regulator PID, czyli matematyczny kod proporcjnalno, róźniczkująco, całkujący.
Jego zadanie polega na regulowaniu wartości porządanej w zależności od zmienności jej chwilowej wartości. W prostszy sposób można powiedzieć, że zadaniem regulatora PID jest korygowanie nastaw, w taki sposób aby ewentualne odchylenia wartości wyjściowej korygować do żądanej wielkści.
W tym celu stosowany jest kod matematyczny w którym regulowane są zmienne przypisane do elementów proporcjonalnego, różniczkującego i całkującego. Poniższy kod prezentuje sposób działania regulatora PID. klawiszami od 1 do 8 możemy zmieniać nastawy poszczególnych zmiennych.
import time
import random
import pygame
from pygame.locals import *
from sys import exit
pygame.init()
class PID:
def __init__(self,P=2.0, I=0.0, D=1.0, Derivator=0, Integrator=0, Integrator_max=500, Integrator_min=-500):
self.Kp=P
self.Ki=I
self.Kd=D
self.Derivator=Derivator
self.Integrator=Integrator
self.Integrator_max=Integrator_max
self.Integrator_min=Integrator_min
self.set_point=0.0
self.error=0.0
def update(self,current_value):
"""
Calculate PID output value for given reference input and feedback
"""
self.error = self.set_point - current_value
self.P_value = self.Kp * self.error
self.D_value = self.Kd * ( self.error - self.Derivator)
self.Derivator = self.error
self.Integrator = self.Integrator + self.error
if self.Integrator > self.Integrator_max:
self.Integrator = self.Integrator_max
elif self.Integrator < self.Integrator_min:
self.Integrator = self.Integrator_min
self.I_value = self.Integrator * self.Ki
PID = self.P_value + self.I_value + self.D_value
return PID
def setPoint(self,set_point):
self.set_point = set_point
self.Integrator=0
self.Derivator=0
def setIntegrator(self, Integrator):
self.Integrator = Integrator
def setDerivator(self, Derivator):
self.Derivator = Derivator
def setKp(self,P):
self.Kp=P
def setKi(self,I):
self.Ki=I
def setKd(self,D):
self.Kd=D
def getPoint(self):
return self.set_point
def getError(self):
return self.error
def getIntegrator(self):
return self.Integrator
def getDerivator(self):
return self.Derivator
BLACK = (0,0,0)
WHITE = (255,255,255)
BLUE = (0,0,255)
GREEN = (0,255,0)
RED = (255,0,0)
ekran=pygame.display.set_mode((1000,800))
pygame.display.set_caption("filtr dolnoprzepustowy")
czcionka = pygame.font.SysFont("monospace", 30)
ekran.fill(WHITE)
pygame.draw.line(ekran,BLACK,(10,10),(10,610),1)
pygame.draw.line(ekran,BLACK,(10,305),(950,305),1)
i=10
erro=0
erro2=0
t1=0
t2=0
wy2=0
wy=0
out2=0
PO=0
PO2=0
P=0.1
I=0
D=0
p=PID(P,I,D)
wzmocnienie=20
p.setPoint(PO)
while True:
pid = p.update(erro)
i=i+1
if i>950:
ekran.fill(WHITE)
pygame.draw.line(ekran,BLACK,(10,10),(10,610),1)
pygame.draw.line(ekran,BLACK,(10,305),(950,305),1)
i=10
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
exit()
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_1:
wzmocnienie=wzmocnienie*2
if event.key == pygame.K_2:
wzmocnienie=wzmocnienie/2
if event.key == pygame.K_3:
P=P+0.1
if event.key == pygame.K_4:
P=P-0.1
if event.key == pygame.K_5:
I=I+0.1
if event.key == pygame.K_6:
I=I-0.1
if event.key == pygame.K_7:
D=D+0.1
if event.key == pygame.K_8:
D=D-0.1
p=PID(P,I,D)
if i==100:
PO=5
if i==200:
PO=1
if i==300:
PO=5
if i==400:
PO=1
if i==500:
PO=5
if i==600:
PO=1
if i==700:
PO=5
if i==800:
PO=1
if i==900:
PO=5
pygame.draw.line(ekran,RED,(i,(305-wzmocnienie*PO)),(i-1,(305-wzmocnienie*PO2)),3)
erro=PO-wy
if erro>0:
wy=wy2-pid
else:
wy=wy2-pid
PO2=PO
wy2=wy
if wy<-300:
out=-290
else:
out=wy
pygame.draw.line(ekran,BLUE,(i,(305-wzmocnienie*out)),(i-1,(305-wzmocnienie*out2)),1)
out2=out
label = czcionka.render("PO= %.2f" %(PO), 1, BLUE,WHITE)
ekran.blit(label, (650, 10))
label = czcionka.render("error = %.2f" %(erro), 1, BLUE,WHITE)
ekran.blit(label, (650, 120))
label = czcionka.render("PID = %.2f" %(pid), 1, BLUE,WHITE)
ekran.blit(label, (650, 350))
label = czcionka.render("Wy = %.2f" %(wy), 1, BLUE,WHITE)
ekran.blit(label, (650, 450))
label = czcionka.render("I = %.2f" %(i), 1, BLUE,WHITE)
ekran.blit(label, (650, 550))
label = czcionka.render("Kl.3 i 4 P= %.2f" %(P), 1, BLUE,WHITE)
ekran.blit(label, (50, 650))
label = czcionka.render("Kl.5 i 6 I= %.2f" %(I), 1, BLUE,WHITE)
ekran.blit(label, (50, 700))
label = czcionka.render("Kl.7 i 8 D= %.2f" %(D), 1, BLUE,WHITE)
ekran.blit(label, (50, 750))
time.sleep(0.02)
pygame.display.update()
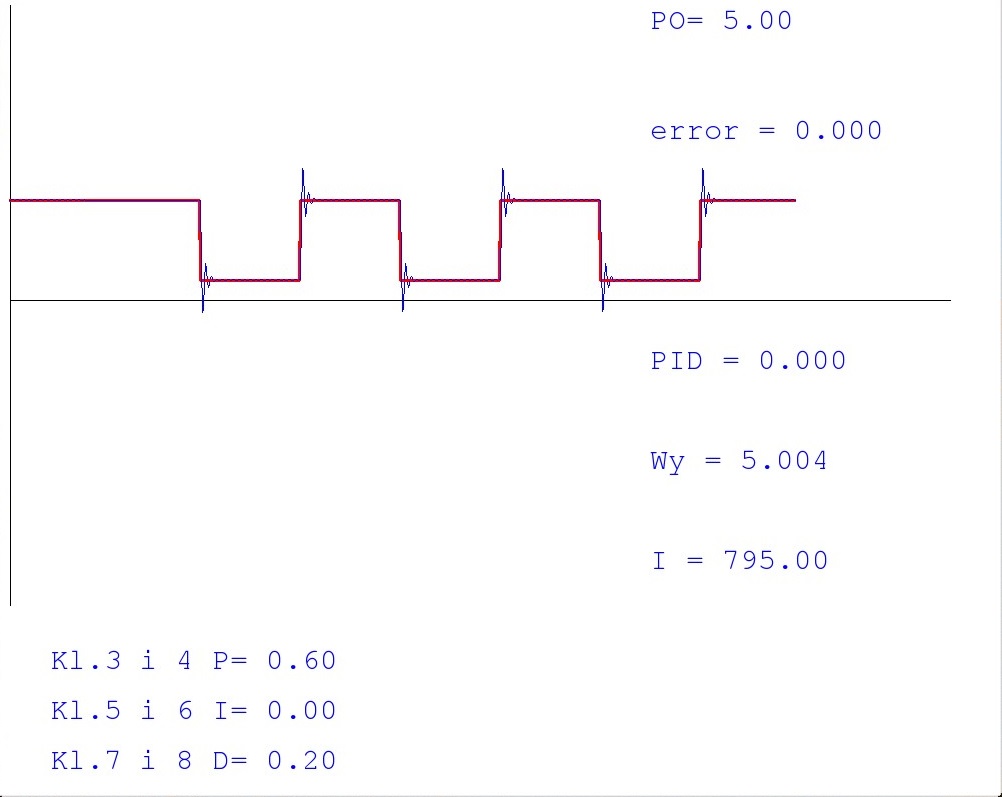
Na poniszym zdjęciu można zuważyć sposób działania regulatora. Kolorem czerwonym prezentowana jest wartość pożądana, a kolorem niebieskim wartość jaka wychodzi z regulatora PID, czyli wartość adaptowana do pożądanej.